


近期,中國科學(xué)院合肥物質(zhì)院智能所仿生智能團(tuán)隊(duì)提出了一種基于雙向注意力的輕量車道線檢測算法。相關(guān)研究成果已在土木與計(jì)算機(jī)交叉學(xué)科著名期刊Computer-Aided Civil and Infrastructure Engineering上發(fā)表。
在自動駕駛和智能交通系統(tǒng)中,車輛需要實(shí)時(shí)感知和理解道路環(huán)境,其中準(zhǔn)確檢測車道線非常重要。使用基于視覺分割的方法可以為自動駕駛車輛提供道路場景中車道線和其他目標(biāo)的位置等信息,從而提供必要的環(huán)境感知,增強(qiáng)安全性。視覺注意力盡管可以提高網(wǎng)絡(luò)的分割性能,然而卷積中的卷積核是一種局部算子,需要依賴網(wǎng)絡(luò)的重復(fù)堆疊才能實(shí)現(xiàn)長距離信息的捕獲;且堆疊的層數(shù)越多,網(wǎng)絡(luò)參數(shù)量就越大,實(shí)時(shí)性就越低;層數(shù)越少,長距離信息捕獲的能力就越弱,分割性能越低。而車道線的特點(diǎn)是線型且細(xì)長狀的,利用長距離像素之間的依賴關(guān)系可檢測出被遮擋的車道線。如何兼顧兩者的平衡是一個(gè)很大的問題。
為進(jìn)一步提高網(wǎng)絡(luò)的實(shí)時(shí)性以及獲取長距離信息間的高捕獲能力,科研團(tuán)隊(duì)提出了基于雙向分離注意力的車道線檢測與分類網(wǎng)絡(luò)(TSA-LNet)。首先,該方法基于語義分割的思想,對編碼器–解碼器模型進(jìn)行重新設(shè)計(jì),以生成參數(shù)較少的輕量級網(wǎng)絡(luò)(LNet)。其次,為了使模型對挑戰(zhàn)性環(huán)境具有魯棒性,引入雙向分離注意力(TSA)構(gòu)建長距離像素之間的依賴關(guān)系。TSA可以集成到LNet中,以捕捉車道的局部紋理和全局背景信息,而不會增加處理時(shí)間。在多個(gè)公開數(shù)據(jù)集上的結(jié)果表明TSA-LNet實(shí)現(xiàn)了優(yōu)秀的檢測準(zhǔn)確性和更快的速度。
張露博士為第一作者,孔斌研究員為通訊作者。本工作得到國家自然科學(xué)基金、安徽省自然科學(xué)基金等項(xiàng)目的支持。
文章鏈接:https://doi.org/10.1111/mice.13051
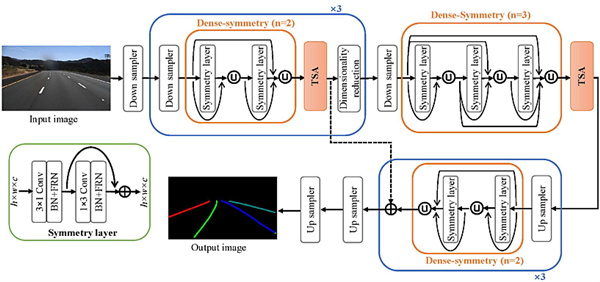
圖1 基于雙向注意力的輕量車道線檢測網(wǎng)絡(luò)架構(gòu)圖

